Cześć
Jakiś czas temu na Fanpage’u w serwisie społecznościowym Facebook zapytałem Was czy chcielibyście otrzymywać informację dotyczące postępów,które poczyniłem w mojej najnowszej konstrukcji oraz opisu tego co już powstało (Jeżeli jeszcze nie polubiłeś fanpage’a to możesz zrobić to teraz KLIK)
Post cieszył się bardzo dużym zainteresowaniem, więc zaczynamy!
Moim najnowszym projektem jest jeżdżąca platforma testowa.
Ma ona posłużyć do testowania różnych rozwiązań: mechanicznych, elektronicznych oraz programistycznych.

Jeżeli wszystko pójdzie zgodnie z planem to już niedługo będziecie mogli poczytać troszkę artykułów na jej przykładzie, które będą dotyczyły m.in.: analizy obrazu w czasie rzeczywistym przy pomocy Raspberry Pi, implementacji algorytmu odnajdującego najlepszą drogę przy pomocy danych z czujników oraz GPS oraz wiele, wiele innych moim zdaniem ciekawych tematów.
Ale koniec opowiadania o tym co będzie. Przejdźmy do tego co jest czyli opisu robota w obecnym stadium rozwoju.
Oprogramowanie oraz procesor
Obecnie pojazd jest wyposażony w dwa mikrokontrolery ATmega 328p oraz ATmega 2560. Do których w przyszłości dołączy jeszcze jeden procesor z rodziny STM oraz Raspberry Pi.
Kod tego robota jest bardzo ciekawy, głównie ze względu na to, że w większości wypadków nie korzystałem tutaj z wysokopoziomowej biblioteki Arduino, jednak w kilku funkcjach została ona użyta.
Kod już niebawem postaram się wrzucić na GitHub’a.
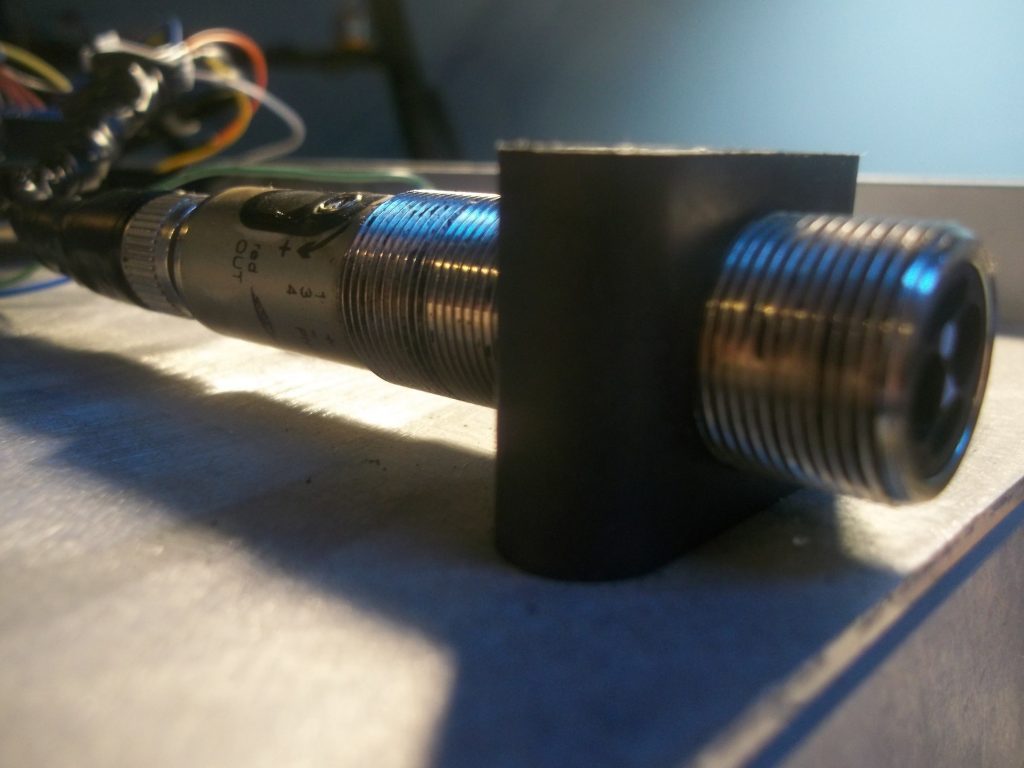
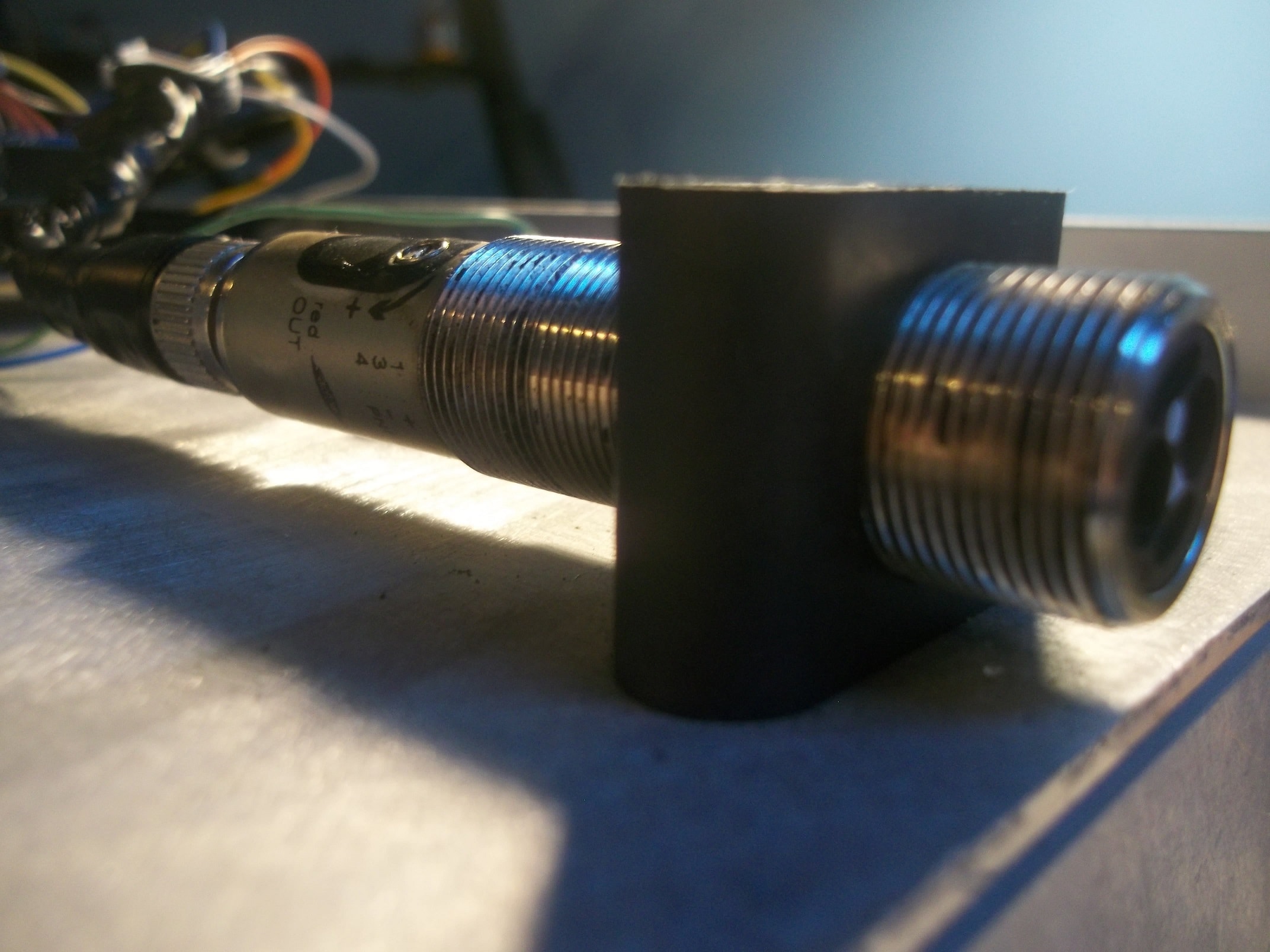
Czujniki
Obecnie w platformie zastosowany jest tylko jeden przemysłowy czujnik odbiciowy, jednak niedługo pojawi się tutaj 5 czujników ultradźwiękowych oraz wiele więcej czujników innego typu, na przykład TCRT5000L.
Konstrukcja
Konstrukcja stworzona jest z arkusza blachy aluminiowej.

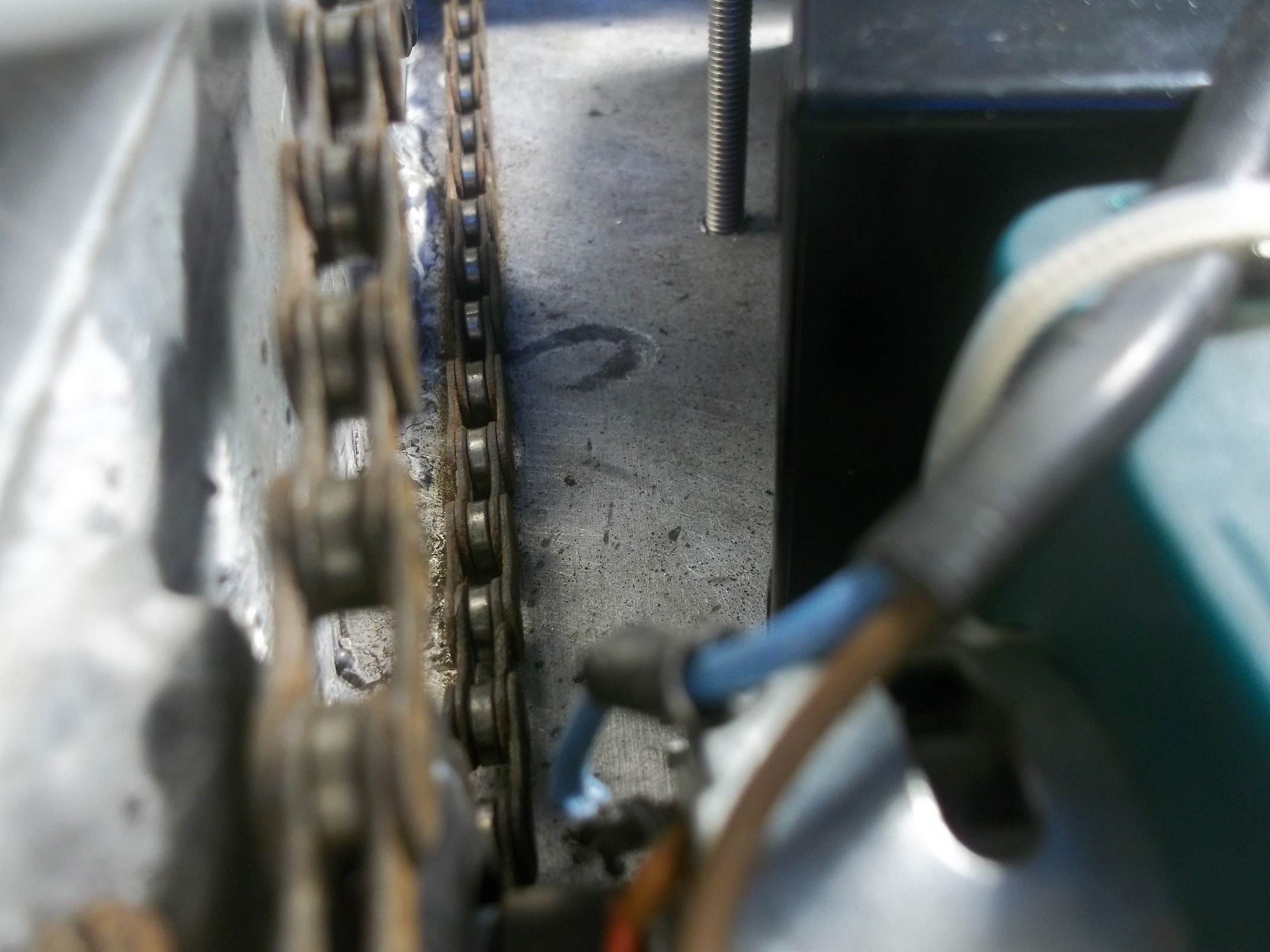
Napęd
Konstrukcja jest napędzana dwoma silnikami. Przeniesienie napędu zrealizowane jest na łańcuchach rowerowych.
Komunikacja
Obecnie komunikacja robota oparta jest o protokół radiowy o częstotliwości 2,4Ghz. Skorzystałem tutaj z gotowego radia. W przyszłości mam zamiar połączyć komunikację radiową działającą na częstotliwości 433Mh oraz sieć Wi-Fi.
Waga
Platforma waży około 9kg. Waga jest oczywiście podana razem z akumulatorem.
Zasilanie
Konstrukcja jest zasilana akumulatorem żelowym o pojemności 12 Ah.
Przewody
Wbrew pozorom temat przewodów jest bardzo interesujący. Obecnie zasilanie z akumulatora do płytki sterującej silnikami poprowadzone jest miedzianymi przewodami YDY o przekroju 1,5 mm2. Ponieważ wszystkie inne przewody miały zbyt małe maksymalne obciążenie prądowe przez co podczas użytkowania, najzwyczajniej w świecie topiła się izolacja.
Funkcje
Obecnie robot działa tylko w dwóch trybach:
-Autonomiczny (robot sam pokonuje przeszkody za pomocą czujnika odbiciowego)
-Manualny (sterujemy za pomocą pilota)
TESTY
Tutaj chciałbym Wam przedstawić filmik z pierwszych jazd (sterowanie przy pomocy pilota radiowego)[su_youtube url=”https://www.youtube.com/watch?v=4K0n-gdj7eI”]<> [/su_youtube]